R.O.V.E.R.: De beste vriend die een geheim agent kan wensen
Onlangs organiseerde RSV Arcana “Casino Mortale”, een LARP in James Bond-achtige setting. Een middag en avond vol avondkleding, martini’s, casinospellen en natuurlijk spionnen, schurken, gadgets, lasers en wereldheerschappij.
Tijdens het bedenken van het evenement werd al snel duidelijk dat we spelers allerlei typische spionage/actie/heist-ervaringen wilden bieden die vaste prik zijn in de films en series waarop we de setting baseerden. Afluisteren, sleeper agents die geactiveerd worden door een codewoord, een geheime vergadering van megalomane schurken waarbij één afvallige geëlektrocuteerd wordt, enzovoort.
Ook het kruipen door ventilatieschachten om ergens in te breken à la Bruce Willis in Die Hard of Tom Cruise in Mission Impossible stond op het lijstje. We hadden onze spelers uiteraard graag écht een aantal ventilatieschachten ingestuurd, maar praktische bezwaren en een algemene behoefte om deelnemers heelhuids weer uit te kunnen zwaaien staken daar een stokje voor. Daar moest dus iets op verzonnen worden.
Het idee
Uiteraard hadden we dit soort moeilijk-te-larpen scenario’s even kunnen rulen door de betreffende spelers apart te nemen en in te fluisteren wat er precies gebeurd was en wat ze gehoord hadden tijdens hun tocht. Soms ontkom je daar nu eenmaal niet aan. Maar , dingen influisteren die een speler zogenaamd heeft meegemaakt strookt niet helemaal met de filosofie achter LARP, en het leek ons jammer om daarop terug te moeten vallen. We wisten dus dat we de spelers wel echt iets te doen wilden geven, maar wat? Al snel ontstond het idee om een digitaal alternatief te verzinnen: een soort minigame waarmee je misschien niet zelf door een schacht kroop en bij een ventilatierooster ging liggen luisteren, maar toch de ervaring in z’n kern kon beleven.
Dat werd R.O.V.E.R.: de Remote Operated Vehicle for Eavesdropping and Reconnaissance. Een op afstand bestuurbaar robotje met microfoon dat door ventilatieschachten zou kunnen rijden en alle geluiden die de microfoon oppikte door zou sturen naar de geheim agent. De binnenspelse logica was: MI6 had dit robotje ontwikkeld nadat ventilatieschachten wereldwijd steeds smaller werden gemaakt in reactie op het bewust vaag gehouden “Nakatomi-incident”. In plaats van zelf door schachten te kruipen zou een geheim agent nu enkel het robotje in een schacht hoeven te plaatsen en het met behulp van een joystick en een scherm door het netwerk van tunnels kunnen sturen.

In de buitenspelse praktijk bestond de ervaring uit drie delen: de ventilatieschacht (een stuk buis met een rooster ervoor dat je in principe overal tegen een muur kon zetten), de robot (de onderkant van een speelgoedauto met wat elektronica erop) en de besturingsmodule met joystick en scherm, ingebouwd in een flinke koffer. De robot zelf hoefde niet daadwerkelijk bestuurbaar te zijn; er was natuurlijk niet echt een netwerk van buizen en zodra een speler de robot in de schacht zette zag je hem toch niet meer. Alles voltrok zich verder op de module in de koffer.
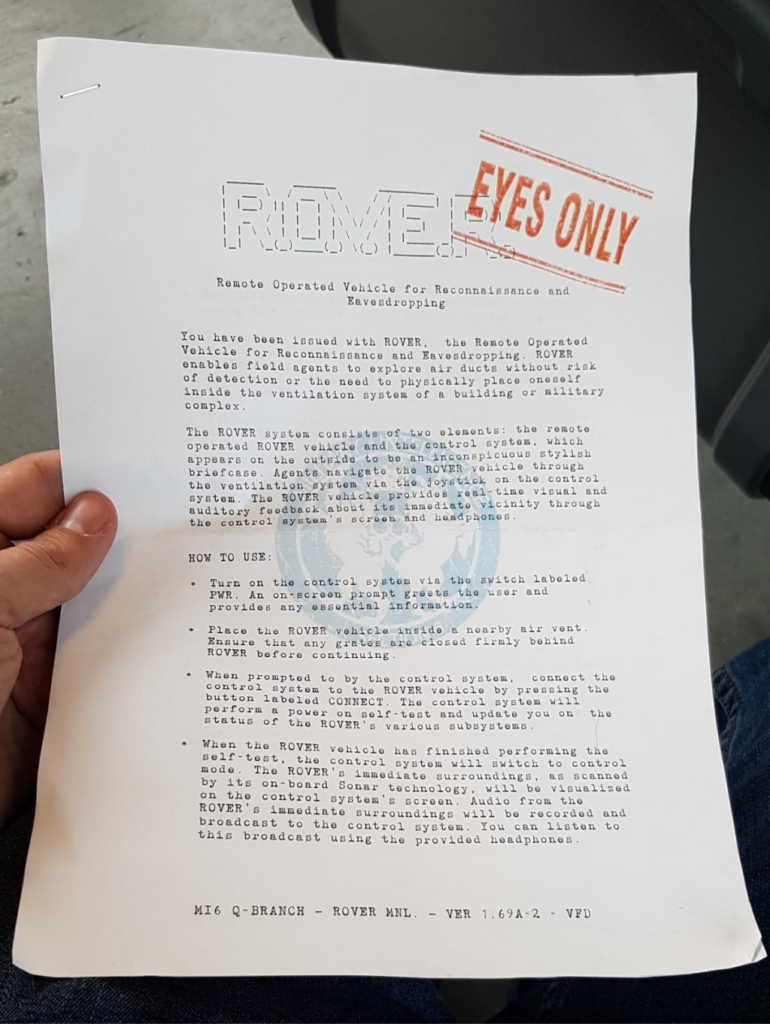
Zodra spelers de power-schakelaar overhaalden verscheen op het schermpje in het deksel een anachronistische jaren ‘70/’80 achtige interface, met klassieke groene letters die één voor één in beeld verschenen. Om wat extra spanning op te bouwen startte het systeem met een berg informatie over Health and Safety (het was een Britse uitvinding, immers) en een langdurige zelftest waarbij zogenaamd allerlei interne hardware werd getest. Dit was uiteraard gewoon een vooraf bedachte animatie die enkel als doel had om gespannen spionnen nog wat langer in spanning te houden.
Een extra voordeel van dit moment: de health and safety-instructies waarschuwden bovendien dat agenten pas “verbinding moesten maken” met de robot als deze veilig in de ventilatieschacht stond – om radioactieve straling, verloren vingers en ander overdreven gevaren te voorkomen mocht er iets mis gaan tijdens het verbinden. De enige reden hiervoor was dat speler de robot in de schacht – en uit het zicht – zouden plaatsen vóórdat ze ermee zouden “verbinden”: dat zou voorkomen dat spelers al eerder zouden proberen het robotje te besturen en zouden zien dat het in werkelijkheid eigenlijk niets deed. Door pas op de “connect” knop te drukken nadat het robotje uit het zicht was bleef de suspension of disbelief overeind.
Wanneer de zelftest eenmaal was voltooid schakelde het systeem over naar de “environmental imaging” modus; het daadwerkelijke spel. In het midden van het scherm verscheen een gloeiende stip (het signaal van de robot) met om zich heen een schematische weergave van de ventilatieschacht. Met behulp van de joystick kon de speler deze stip vervolgens voortbewegen in het tunnelnetwerk: langzaam maar zeker werd steeds meer van de omgeving zichtbaar (het zogenaamde fog of war effect) en kwamen ventilatieroosters in beeld. Zodra je deze dicht genoeg naderde kon je horen wat er zich achter dat rooster afspeelde: omgevingsgeluiden, gesprekken waar belangrijke informatie uit op te vangen was, een gesprekje waarbij de ene beveiliger de ander herinnert wat ook alweer de toegangscode voor de kluis was, enzovoort. Dit waren vooraf opgenomen geluiden, maar mocht er iets geïmproviseerd moeten worden dan was het spel zo gebouwd dat we ook ter plekke iets op hadden kunnen nemen en een MP3 daarvan aan een ventilatierooster hadden kunnen hangen, mocht dat nodig blijken. Alle geluiden werden door het spel afgespeeld met een effect dat ze een beetje vervormde en liet galmen, alsof je ze hoorde vanuit een stalen koker. Op die manier konden we, indien nodig, snel even een gesprekje opnemen en in het spel gooien zonder dat we eerst nog allerlei audio-software nodig hadden om de juiste effecten toe te passen.
De hardware
De hele toepassing draaide op een laptop die verborgen zat in een dubbele bodem in de koffer, uiteraard met ingebouwde batterij en speakers. Een klein 7-inch schermpje in het deksel was via een HDMI-kabel verbonden met de laptop, en kreeg energie uit een flinke powerbank die eveneens in het deksel zat. Verschillende visuele effecten (bollend beeld met vervorming aan de randen, ruis en een soort scanline die af en toe over het beeld bewoog) moesten suggereren dat je naar een ouderwetse beeldbuis keek. Om dat effect nog wat te versterken zat er een rechthoekige fresnel lens voor het schermpje: een plastic laagje dat vroeger nog wel eens gebruikt als vergrootglas om kleine beeldbuizen leesbaarder te maken. Afhankelijk van je kijkhoek vervormde die lens het beeld nog wat meer waardoor het er nog minder als een modern lcd-scherm uitzag.

De besturing van het geheel bestond uit een aan/uit schakelaar, de connect-knop en de joystick. Die laatste was simpelweg een van de thumbsticks op een oude Xbox 360-controller waarvan de behuizing en alle overbodige uitstekende delen (zoals de tweede thumbstick) waren verwijderd. De connect-knop was een drukknop die aan de rechter schouderknop op de controller was gesoldeerd. Als je de connect-knop indrukte dacht de controller dat je de rechter schouderknop had ingedrukt, en als dat gebeurde deed het spel alsof het verbonden was met de robot en werd het daadwerkelijke spel gestart.
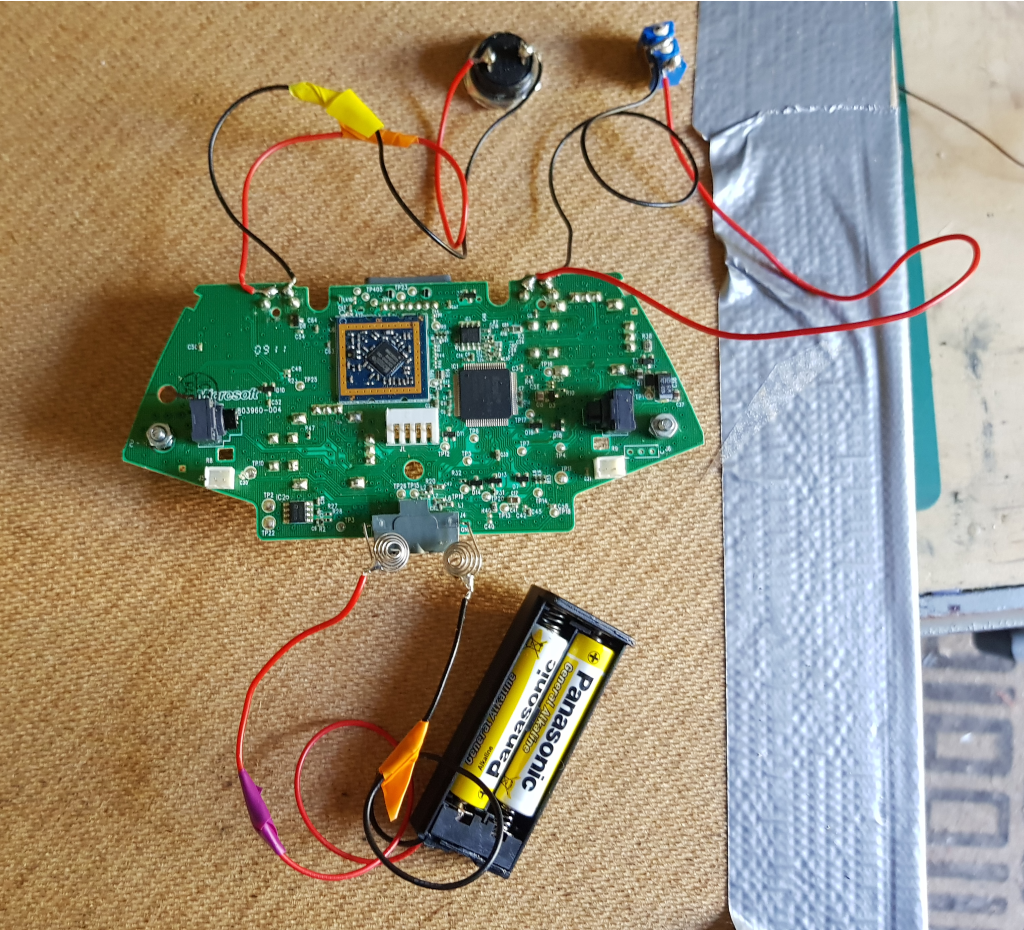
De powerknop was een tuimelschakelaar die op dezelfde manier met de linker schouderknop was verbonden. Als de koffer “uit” stond draaide het spel eigenlijk al; er werd alleen een zwart scherm getoond, en pas als de powerknop werd ingeschakeld verscheen er na een korte pauze beeld op de monitor, zodat het leek alsof de boel daadwerkelijk aan ging. Het spel bleef hiervoor naar de linker schouderknop luisteren: zolang deze niet was ingedrukt (de schakelaar stond op “uit”) toonde het een zwart scherm, zodra deze wel werd ingedrukt (de schakelaar stond op “aan”) dan begon de opstart animatie.
De controller draaide op twee AA-batterijen in een batterij houdertje dat aan de batterij-pinnetjes zat gesoldeerd. Omdat ik alleen een draadloze controller had liggen, moest hij met de laptop verbonden worden via een USB-dongle. Een nadeel: je moet een Xbox 360 controller altijd aanzetten met behulp van de grote groene startknop in het midden, maar voor die knop was geen plek; omdat de joystick door het paneel in de koffer naar buiten moest steken zat de printplaat vrijwel tegen het paneel aan. Een houtje-touwtje oplossing die verbazend goed bleek te werken was een klein stukje soldeerdraad met plakband vastplakken aan de connectoren van de startknop, zodat ze verbinding maakten. De controller dacht daarmee dat de startknop continu werd ingedrukt en ging dan aan zodra je de batterijen in de houder deed.
Ten slotte was het geheel ook nog voorzien van een korte handleiding, uitgetypt op MI6 papier en voorzien van een handgeschreven notitie van Q zelf.
Het resultaat
Hoe ging dit alles nou in de praktijk? Uiteindelijk hebben maar drie spelers het apparaat in actie gezien en was door de muziek in de naastgelegen ruimte vrijwel niets te horen van de geluiden, waardoor een en ander toch ingefluisterd moest worden, maar ach. Een koptelefoon of twee zou wat dat betreft een goede toevoeging voor toekomstige evenementen zijn. Het spelplezier was er overigens niet minder om: toen duidelijk werd dat er afluisterapparatuur nodig was om in ventilatieschachten te gaan luisteren zei een van de spelers dat hij aannam dat we dit gewoon zouden rulen en er niet een hele prop zou zijn om dit mee uit te spelen. Het enthousiasme toen er dus wel degelijk een hele koffer met daadwerkelijk afluisterapparatuur bleek te zijn was alle moeite wat mij betreft al waard.

Uitproberen of zelf mee aan de slag?
Wie een en ander zelf uit wil proberen kan terecht op GitHub waar je de (Windows-only) versie kan uitproberen. Je hoeft niets te installeren, enkel de zip-file uitpakken en “Ventilation Ducts.exe” uit te voeren. Hij werkt ook met het toetsenbord: De connect-knop is de C-toets en met de pijltjestoetsen bestuur je de robot. Zie voor meer informatie ook de readme.
Wil je zelf aan de slag en dit project aanpassen voor je eigen evenement, dat kan. Alle code is open source en te vinden op GitHub. Het geheel is een Unity-project in C#, dus enige kennis van Unity is wel vereist.
Ben je enthousiast maar heb je vragen, of wil je weten of je op een of andere manier op dit project voort kan bouwen, laat het me weten via baspaap@gmail.com. Ook als je de R.O.V.E.R. (of een eigen variant erop) in een eigen evenement gaat gebruiken hoor ik het graag. Al was het maar om zelf mee te kunnen doen!